

Weiterentwicklung eines spielbasierten Fingerkraft-Trainingssystems
Bachelorarbeit von S. Danzinger, Studiengang Angewandte Elektronik, FH Campus Wien
Zusammenfassung
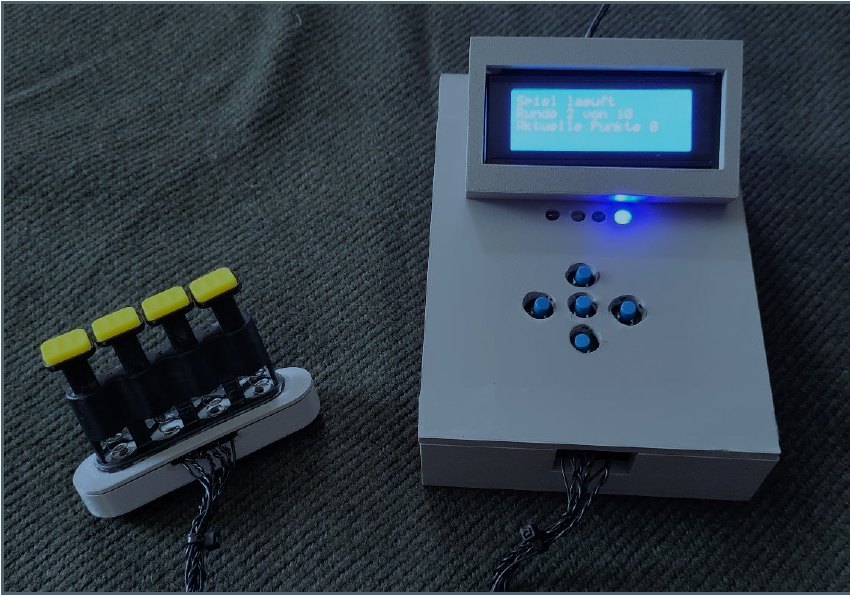
Der im Rahmen der LV Elektronischer Geräteentwurf (4. und 5. Se.) entworfene Prototyp für ein Fingerkraft-Training wurde verbessert und weiterentwickelt. Das System soll ein Fingerkrafttraining abwechslungsreicher gestalten, indem das Trainingsgerät mit einem Spiel gekoppelt ist. Jeder Finger ist dazu einzeln in das Spiel eingebunden, um die Kraft der Finger und der Hand zu trainieren. Das Endergebnis ist ein voll funktionsfähiger Prototyp (Abb. 1).
Einführung
Verschiedene Verletzungen oder Erkrankungen tragen dazu bei, dass die Hand- und Fingerkraft beeinträchtigt wird. Um die Handfunktion zu trainieren bzw. zu verbessern werden z.B. mechanische Trainingsgeräte eingesetzt, wobei das Training häufig als monoton wahrgenommen wird. Das kann die Motivation negativ beeinflussen.
Ausgehend davon wird ein Gerät entwickelt, dass einen handelsüblichen Handkrafttrainer mit einem elektronischen System koppelt, um mit den Bewegungen der Finger im Laufe des Trainings ein Spiel zu steuern. Folgende Forschungsfrage soll beantwortet werden:
FF1: Kann der erste Prototyp des Fingerkrafttrainers um die Aspekte Rechts- und Linkshändertauglichkeit, Verbesserte Handlichkeit durch Verkleinerung, Optimierung der Schaltung, Erweiterung der Spieloptionen erweitert werden?
Hintergrund
Einschränkungen der Handfunktion können verschiedenste Ursachen haben. Zu den häufigsten zählen Frakturen (42%) und Sehnenverletzungen (29%) [1]. Neben Unfällen können auch verschiedene Erkrankungen, wie Rheuma, Schlaganfall, MS die Handfunktion beeinträchtigen [2].
Das Trainieren der Hand- und Fingerkraft verbessert neben der Kraft auch Geschicklichkeit und feinmotorische Fähigkeiten. Für das Training sind, neben mechanischen Trainingsgeräten, auch Alltagsgegenstände oder Bälle aus verschiedenen Materialien geeignet. Auch technische Entwicklungen, wie der Robotic Handschuh [3] oder Therapiegeräte mit VR-Anwendungen [4] kommen im Bereich des Hand- und Fingertrainings zum Einsatz.
Methoden
Zur Entwicklung des Prototyps ist der Entwurf einer Schaltung, die Herstellung der elektronischen Komponenten und des Gehäuses (3D-Druck) und die Erstellung der notwendigen Software durchzuführen. Bis auf einzelne Komponenten, wie Sensoren, Mikrocontroller, Display, etc. wird der gesamte Prototyp hergestellt. Das System arbeitet mit einem STM32F411 Discovery Board. Hall-Sensoren detektieren bei Betätigung einer der vier Taster des Trainingsgeräts ein Magnetfeld und messen so die Bewegung der Finger beim Training. Die Signale der Sensoren werden verarbeitet und das implementierte Spiel wird damit gesteuert. Am Steuergerät kann das System bedient werden.
Ergebnisse
Das Ergebnis dieser Arbeit ist ein voll funktionsfähiges Trainingsgerät für die Hand- und Fingerkraft. Das auf dem System implementierte Spiel verfügt über verschiedene Spiele-Level, um das Training für den Zeige-, Mittel-, Ring- und kleinen Finger abwechslungsreich zu gestalten. Es kann die Empfindlichkeit der Sensoren verändert werden, um mehr oder weniger Kraft beim Drücken der Tasten aufbringen zu müssen. Die Reaktionszeit kann an die Anforderungen der Spieler*innen angepasst werden.
Das Spiel selbst zeigt anhand verschieden farbiger LEDs an, welcher Finger an der Reihe am Trainingsgerät die (vorab für diesen Finger bestimmte) Taste zu drücken. Schnelligkeit und Kraft werden bei den Ergebnissen berücksichtigt.
- Quelle: Danzinger, S. Weiterentwicklung eines spielbasierten Fingerkraft-Trainingssystems. Bachelorarbeit am Studiengang Angewandte Elektronik. FH Campus Wien. 2022
- Quelle (Titelbild): pixabay | Hans
Referenzen:
[1] Menke, H. Therapie der akuten Shenenverletzung an der Hand. In: Trauma und Berufskrankheit. Vol.15.pp153-157. 2013
[2] Heine, PJ, Williams, MA, Williamson, E. et al. Development and delivery of an exercise intervention for rheumatoid arthritis: Strengthening and stretching for rheumatoid arthritis of the hand (SARAH) trial. Physiotherapy Vol 98 (2), tt.121-130. 2012
[3] Plattform Made in China. Upper Limb Robotic Machine Physiotherapiy Training Gloves. (Stand: 11.05.23) unter: https://syrebo.en.made-in-china.com/product/RFOtqmNPZDWp/China-Upper-Limb-Robotic-Machine-Physiotherapy-Training-Occupational-Hand-Training-Gloves.html
[4] ErgoRestart. Robotik in der Neurologie. (Stand: 11.05.23) unter: https://ergo-restart.ch/technologien-und-robotik/